TB6600 스테퍼 모터 컨트롤러 : 핀아웃, Arduino 인터페이스 및 작동 방식
목록
TB6600 스테퍼 모터 드라이버 모듈의 개요
그만큼 TB6600 스테퍼 모터 드라이버 모듈은 2 상 스테퍼 모터를 제어하기위한 탄력성과 적응성으로 구별되는 장치입니다.그것은 다양한 마이크로 컨트롤러 (주로 Arduino)와 완벽하게 연결되어 정확한 5V 디지털 펄스 출력의 생성을 촉진합니다.이러한 출력은 모터 제어의 섬세한 균형을 유지하기 위해 역동적입니다.9-42V DC의 전압 범위 내에서 작동하고 4A의 피크 전류를 지원하는이 제품은 다양한 모터 구동 프로젝트를위한 다양한 선택입니다.이 적응성을 사용하면 모터 포지셔닝 및 속도를 효율적으로 관리 할 수 있으며, 이는 코딩 복잡성을 최소화하는 응용 분야에서 매우 유익합니다.이 모듈의 고주파 옵토 커 커플러 분리는 간섭 위험을 줄이고 꾸준한 작동을 보장함으로써 신뢰성을 크게 향상시킵니다.
수많은 마이크로 컨트롤러와의 조화로 인해 TB6600 드라이버는 복잡한 모터 제어가 필요한 프로젝트에 적합한 선택입니다.Arduino와 같은 플랫폼과 원활하게 통합되어 다양한 기대를 충족시킬 수있는 능력을 반영합니다.예를 들어, CNC 기계 또는 3D 프린터 에서이 드라이버를 사용하면 정확하고 제어 된 움직임이 가능하며, 이는 다양한 필드의 유용성을 보여줍니다.
이 모듈은 하이브리드 구성뿐만 아니라 2 상 및 4 상 스테퍼 모터에 대한 지원 덕분에 두드러집니다.Bipolar H-Bridge 설계는 전압 및 전류를 효율적으로 관리하는 데 필수적이며 드라이버가 응용 프로그램에서 피크 성능을 제공합니다.자동화 된 생산 라인 및 로봇 공학과 같은 정밀성 및 신뢰성이 우선시되는 환경에서는 이러한 기능이 중요합니다.
특징
|
특징 |
설명 |
|
드라이버 유형 |
양극성 H- 브리지 DC 드라이버 |
|
출력 현재 옵션 |
8 개의 유형 (0.5A ~ 3.5A), 최대 4A를 선택할 수 있습니다. |
|
세분 모드 |
6 개 모드로 선택할 수있는 최대 32로 나뉩니다 |
|
마이크로 단계 옵션 |
8 종류 (1, 2/a, 2/b, 4, 8, 16, 32) |
|
입력 신호 분리 |
고속 광전성 분리 |
|
인터페이스 |
전체 표준 단일 펄스 인터페이스 |
|
오프라인 홀드 기능 |
예 |
|
환경 적합성 |
가혹한 환경을위한 반 밀집된 신체 |
|
파워 잠금 기능 |
반자동, 에너지 절약 |
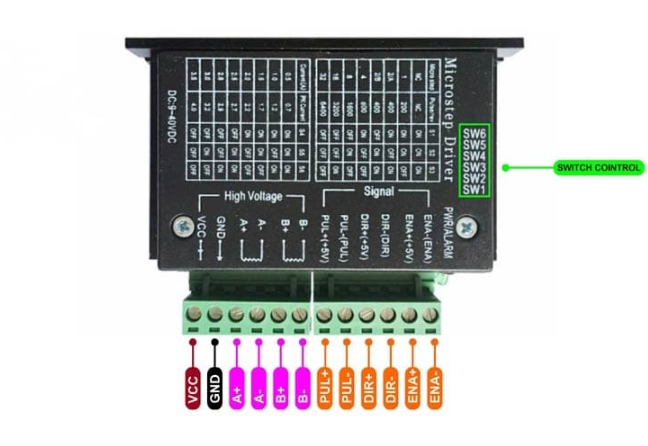
핀 구성
기술 사양
|
사양 |
세부 |
|
작동 전압 |
9-40V DC |
|
출력 전류 |
0.7A-4.0A (딥 스위치를 통해 8 단계로 선택 가능) |
|
입력 펄스 주파수 |
최대 20kHz |
|
입력 신호 레벨 |
5V 신호 레벨 |
|
혁명 당 맥박 |
200-6400 |
|
로직 신호 전류 |
8A-15A |
|
모터 호환성 |
2 상 및 4 상 스테퍼 모터에 적합합니다 |
|
보호 기능 |
과전류, 과열 보호 |
|
입력 격리 |
광학적으로 고립되었습니다 |
|
단열성 저항 |
500 Megohms |
|
지원 모드 |
PUL/FIR 모드 |
|
비용 |
저렴한 비용 |
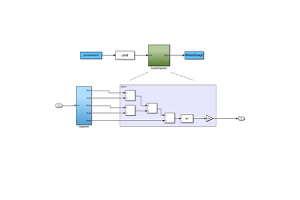
TB6600의 H- 브리지 회로 구성
TB6600 스테퍼 모터 드라이버 모듈은 효율적인 작동을 위해 양극성 H- 브리지 구성을 사용하여 2 상 및 4 상 스테퍼 모터를 제어하도록 설계된 심각한 구성 요소입니다.이 구성은 MOSFET 트랜지스터를 사용하여 현재 처리 및 열 안정성 측면에서 고성능을 보장합니다.이 모듈은 각 펄스로 모터 스테핑을 트리거하는 두 개의 1 차 제어 핀과 상호 작용하여 작동합니다.이 입력은 함께 모터의 스테핑 시퀀스와 회전 방향을 정확하게 제어 할 수 있습니다.

회로 다이어그램은 H- 브리지 구조로 배열 된 4 개의 주요 트랜지스터 인 T1, T2, T3 및 T4를 강조합니다.이 MOSFET은 모듈 작동의 중추로 스테퍼 모터를 구동하는 데 필요한 전류의 양방향 흐름을 허용합니다.또한, 다이어그램에는 플라이 백 다이오드 (D1, D2, D3 및 D4)가 포함되어 있으며, 이는 모터의 유도 부하로 인한 전압 스파이크로부터 회로를 보호하는 핵심입니다.이 다이오드는 작동 중에 과전류와 민감한 구성 요소의 손상을 방지합니다.A+, A-, B+및 B- 터미널은 모터를 연결하는 데 사용되어 모터 샤프트의 정확하고 제어 된 이동을 보장합니다.
H-Bridge가 어떻게 모터 회전을 가능하게합니까?
TB6600 드라이버는 H- 브리지에서 MOSFET 트랜지스터의 조정 된 동작을 통해 작동합니다.예를 들어:
• 트랜지스터 T1 및 T4가 활성화 될 때 시계 방향 회전이 발생하여 A+에서 A-로 전류 흐름을 지시합니다.
• 시계 반대 방향 회전은 T2와 T3이 관여 할 때 발생하여 전류 흐름을 A-에서 A+로 역전시킵니다.
트랜지스터의 이러한 교대 활성화는 원활한 양방향 운동을 보장합니다.최적의 토크와 효율적인 작동을 달성하려면 정확한 타이밍 및 전압 조절이 필수적입니다.
다목적 제어를위한 작동 방식
TB6600은 애플리케이션 요구 사항에 따라 토크, 정밀도 및 스텝 크기의 균형을 맞추기 위해 설계된 4 개의 별개의 작동 모드를 지원합니다.
• 웨이브 모드:이 모드에서는 한 번에 하나의 코일 만 활력을 얻습니다.단일 코일을 활성화하면 모터를 한 방향으로 90도 회전시키면서 전류를 역전 시키면 반대 방향으로 회전합니다.코일 사이를 번갈아 가면 모터는 연속적인 작동을 달성합니다.이 모드는 간단하지만 다른 모드에 비해 토크가 적습니다.
• 전체 단계 모드: 두 코일은이 모드에서 동시에 에너지가되어 더 강한 자기장을 생성합니다.이로 인해 토크가 증가하여 더 많은 전력과 안정성이 필요한 응용 분야에 이상적입니다.
• 하프 단계 모드: 파동 모드와 풀 단계 모드의 조합으로,이 모드는 단일 코일과 두 코 코일 사이를 번갈아 가며 교대합니다.스텝 크기를 효과적으로 45 도로 줄여 정밀도와 토크 사이의 균형을 제공합니다.그러나, 토크는 특정 단계에서 하나 또는 둘 다 코일이 활성화되는지에 따라 달라질 수 있습니다.
• 마이크로 스텝 모드 : 모든 모드 중 가장 정확한 Microstep 모드는 모터 단계를 통해 전류를 조심스럽게 조절하여 스텝 크기를 더욱 줄입니다.이는 고급 회로를 사용하여 단계간에 매끄럽고 점진적인 전환을 생성합니다.이 모드는 CNC 머신 또는 로봇 공학과 같은 높은 정밀도 및 일관된 토크가 필요한 애플리케이션에 이상적입니다.
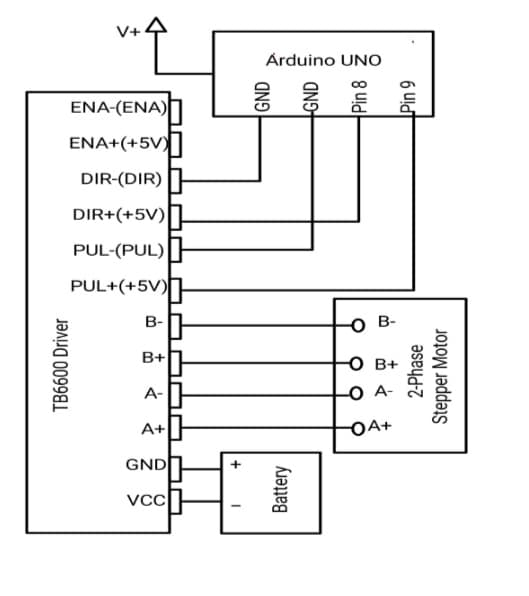
TB6600을 Arduino Uno와 통합합니다
스테퍼 모터를 효율적으로 제어하려면 안정적인 하드웨어와 신중하게 프로그래밍 된 소프트웨어의 조합이 필요합니다.TB6600 스테퍼 모터 드라이버는 2 상 스테퍼 모터를 작동하기위한 훌륭한 도구로 두드러집니다.파도, 풀 단계, 하프 단계 및 마이크로 스텝핑과 같은 여러 운영 모드를 지원합니다.저전압, 과전류 및 과열에 대한 보호 장치를 포함한 내장 보호 기능은 정밀도와 내구성을 요구하는 프로젝트에 대한 확실한 선택입니다.
Arduino UNO로 TB6600을 설정하려면 다음 구성 요소를 수집하십시오.
• Arduino Uno R3
• TB6600 스테퍼 모터 드라이버 (4A 버전)
• 스테퍼 모터 (권장 등급이 1.65a)
• 신뢰할 수있는 전원 공급 장치 (예 : 배터리 또는 규제 DC 전원)
• 점퍼 와이어
• 컴퓨터에 Arduino IDE가 설치되었습니다
TB6600을 Arduino와 통합하려면 다음과 같은 자세한 지침을 따르십시오.
방향 및 펄스 신호를 연결하십시오
• TB6600의 DIR+ 및 PUL+ 터미널을 각각 Arduino Pins 8 및 9에 연결하십시오.이 핀은 방향과 펄스 신호를 전송합니다.
• Arduino의지면 (GND) 핀에 Dir- 및 Pullinals를 부착하십시오.
• 모터를 TB6600에 연결하십시오. 스테퍼 모터 와이어를 TB6600 단자에 연결하십시오.
• 모터의 한 코일에 대한 A+ 및 A-.
• 다른 코일의 경우 B+ 및 B-.
• 전원 TB6600 드라이버 : TB6600의 VCC 및 GND 핀을 전원 공급 장치에 연결하십시오.전압이 손상을 피하기 위해 모터와 운전자의 요구 사항과 일치하는지 확인하십시오.
마이크로 스텝 해상도 조정
TB6600을 사용하면 SW1 및 SW2 스위치를 사용하여 Stepper Motor의 이동 정밀도를 미세 조정할 수 있습니다.이 스위치를 다음과 같이 조정하십시오.
• 1/4 단계 해상도 : SW1을 켜고 SW2를 끄십시오.
• 단계 해상도 : SW1을 끄고 SW2를 켜십시오.
• 1/32 단계 해상도 : SW1과 SW2를 모두 설정하십시오.
• 전체 단계 모드 : SW1과 SW2를 모두 설정하십시오.
진실 테이블
|
SW2 |
마이크로 스텝 해상도 |
|
끄다 |
1/32 단계 |
|
에 |
1/8 단계 |
|
끄다 |
1/4 단계 |
|
에 |
전체 단계 |
스위치 조정을 통해 프로젝트의 요구에 따라 정밀도와 속도 사이의 균형을 최적화 할 수 있습니다.
TB6600에는 안전한 전류 한계 내에서 모터가 작동하는지 확인하기 위해 TB6600에는 전류 흐름을 조정하기위한 추가 스위치 (SW4 및 SW6)가 있습니다.이 설정은 다음에 유용합니다.
• 과부하 손상 방지.
• 일관된 모터 성능 유지.
• 모터 전류가 두 구성 요소를 보호하기 위해 운전자의 최대 4A 미만을 유지하는지 항상 확인하십시오.
• 모터 방향 제어 : 모터가 반 시계 방향으로 회전하려면 Arduino 코드에서 DIR+ 핀의 상태를 수정하십시오.
• 테스트 및 문제 해결 : 설정을 완료 한 후 기본 스테퍼 모터 컨트롤 스케치를 업로드하여 배선 및 드라이버 기능을 확인하십시오.
• 과열을 피하십시오 : 특히 고전류 응용 분야에서 TB6600 드라이버에 대한 적절한 환기를 보장하십시오.
응용 프로그램
TB6600 모듈은 세심한 모터 제어가 사용되는 수많은 부문에서 적극적인 역할을합니다.고유 한 기능을 강조하는 다양한 구현에서 적응성이 빛납니다.
안테나 포지셔닝
통신 분야에서 최적의 안테나 정렬을 달성하는 것은 품질 신호 수신 및 전송에 필수적입니다.TB6600은 정밀 움직임을 촉진하여 통신 시스템의 효과를 향상시킵니다.
스테퍼 모터 관리
자동화 및 로봇 공학 내에서 TB6600을 통해 정확한 스테퍼 모터 취급이 달성되므로 이동 정밀도를 개선하고 시스템 신뢰성을 강화할 수 있습니다.
CNC 운영
CNC (Computer Numerical Control) 기계의 경우 TB6600은 복잡한 절단 및 밀링 프로세스를 향상시켜 작업에서 높은 수준의 정확도와 반복 가능한 정밀도를 유지할 수 있습니다.
3D 프린팅 정밀도
첨가제 제조, 특히 3D 프린팅에서 TB6600은 자세한 모터 컨트롤을 제공하여 복잡한 모양 및 형태를 제작하는 데 필요한 인쇄 헤드의 정확한 위치를 지원합니다.
복잡한 모터 제어
이 모듈은 복잡한 자동화 시스템 내의 복잡한 모터 제어 작업에 유용하여 효율성을 높이고 정제 된 관리를 가능하게합니다.
속도, 위치 및 회전 제어
TB6600은 끊임없이 변화하는 환경에서 성능을 최적화하는 데 사용되는 정확한 속도와 회전 제어가 필요한 시나리오에서 탁월합니다.
이미징 장치 및 뱅킹 시스템
이 모듈은 부드럽고 정확한 모터 이동을 보장하여 카메라 및 ATM의 안정적인 작동을 지원하여 장치의 작동 수명을 연장합니다.
조각 장치의 정밀도
새겨진 도구 및 기계의 경우 TB6600은 정밀도와 세부 사항이 지배적 인 산업의 위험한 요소 인 미세하게 상세한 설계를 실행하는 데 필요한 정확한 제어를 제공합니다.
우리에 대해
ALLELCO LIMITED
더 많은 것을 읽으십시오
빠른 문의
문의를 보내 주시면 즉시 응답하겠습니다.
자주 묻는 질문 [FAQ]
1. TB6600 드라이버에는 어떤 전원 공급 장치를 사용해야합니까?
TB6600 스테퍼 모터 드라이버는 8V에서 45V 사이의 전원 공급 장치 전압으로 작동합니다.
2. TB6600으로 스테퍼 운동 속도를 어떻게 제어 할 수 있습니까?
TB6600은 PWM (Pulse-Width Modulation)을 사용하여 모터 속도를 조정합니다.PWM 주파수를 수정하여 속도를 변경할 수 있습니다.
3. TB6600이 고전류 스테퍼 모터를 지원할 수 있습니까?
예, TB6600은 최대 4.5a를 처리 할 수 있으므로이 현재까지 평가 된 스테퍼 모터와 호환됩니다.
4. TB6600을 사용하여 모터 방향을 어떻게 바꾸려면?
모터 방향을 바꾸려면 제어 핀에서 입력 신호 시퀀스를 전환하십시오 (예 : 전방의 경우 IN1-in2-in3-in4, 리버스의 경우 IN4-in3-in2-in1).
5. 스테퍼 모터를 4 개 이상의 전선으로 TB6600에 연결할 수 있습니까?
TB6600은 4 와이어 스테퍼 모터를 위해 만들어졌습니다.모터에 4 개 이상의 전선이 있으면 다른 드라이버가 필요합니다.
6. TB6600은 NEMA23 스테퍼 모터와 호환됩니까?
TB6600은 NEMA17 모터와 잘 작동하지만 현재 요구 사항이 높기 때문에 NEMA23 모터에 일반적으로 적합하지 않습니다.

E18-D80NK 조정 가능한 IR 센서에 대한 완전한 안내서
12월12일에서
DS3231 RTC 모듈 설명 : 핀 다이어그램, 사양 및 마이크로 컨트롤러 인터페이스
12월12일에서
인기있는 게시물
-

복잡한 명령 세트 컴퓨터 : 컴퓨터를 어떻게 변경 했습니까?
4월18일에서 147757
-

USB-C 핀아웃 및 기능
4월18일에서 111931
-
Xilinx Unified Simulation Primitive 사용 : FPGA 설계 및 시뮬레이션에 대한 포괄적 인 안내서
4월18일에서 111349
-
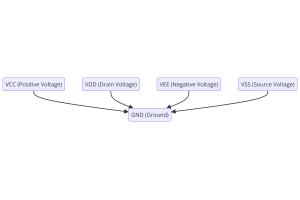
전자 장치의 전원 공급 장치 전압: VCC, VDD, VEE, VSS 및 GND의 의미
4월18일에서 83719
-

RJ45 커넥터 가이드 : 핀아웃, 배선, 케이블 유형 및 사용
1월1일에서 79508
-
현대 전기 시스템에서 와이어 컬러 코드에 대한 궁극적 인 가이드
전기 시스템이 색상을 사용하는 방식은 외관만을위한 것이 아닙니다.각 와이어 색상은 이제 특정 기능을 나타내므로 설치 및 유지 보수 중에 전기 부품을보다 쉽게 식별하고 처리 할 수 있습니다.이는 운영 프로세스를 가속화 할뿐만 아니라 실수의 기회를 줄이고 사용자와 기술자 모두가 안전하게 지내도록 도와줍니다.이 기사는 와이어 컬러 코드의 중요성, 안...1월1일에서 66884
-
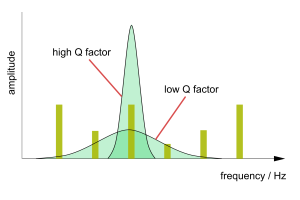
품질 (Q) 요인 : 방정식 및 응용
RF (Radio Frequencies)를 사용하는 전자 시스템에서 인덕터와 공진기가 얼마나 잘 작동하는지 확인할 때 품질 요소 또는 'Q'가 중요합니다.'Q'는 회로가 에너지 손실을 최소화하고 시스템이 주요 주파수 주변에서 처리 할 수있는 주파수 범위에 얼마나 잘 영향을 미치는지 측정합니다.인덕터, 커패시터 및 조정 된 회로가있는 시스템에서 더 높은...1월1일에서 63010
-

퍼지 밸브 가이드 : 최적의 엔진 성능을위한 기능, 증상, 테스트 및 교체
퍼지 밸브는 대기로 빠져 나가기 전에 연료 증기를 관리함으로써 공기를 깨끗하게 유지하는 데 도움이되는 자동차 시스템의 핵심 부분입니다.이것은 오염을 줄임으로써 환경에 도움이 될뿐만 아니라 자동차를 개선하고 연료를보다 효율적으로 사용하게합니다.이 기사에서는 퍼지 밸브가 작동하는 방식, 유형 및 제대로 작동하는지 확인하는 방법을 포함하여 Purge 밸브에...1월1일에서 62979
-
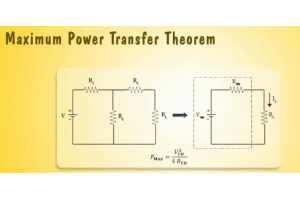
최대 전력 전송 정리로 피크 성능을 달성합니다
최대 전력 전송 정리는 배터리 또는 발전기와 같은 소스의 에너지가 연결 하중으로 흐르는 방법을 설명합니다.부하가 가장 많은 전력을받는 정확한 조건을 보여줍니다.이 기사는 정리의 의미, DC 및 AC 회로에서 작동하는 방식, 배후의 증거, 실제 응용 프로그램 및 장점 및 단점을 다룹니다.결국,이 원리가 태양 전지판, 라디오, 스피커 및 무선 충전과 같은...1월1일에서 54081
-
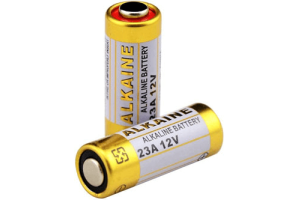
A23 배터리 사양 및 호환성
A23 배터리는 전압이 높은 작은 실린더 모양의 배터리입니다.23A, 23AE 또는 MN21이라고도하는 경우에도 12 볼트로 작동하며 AA 또는 AAA 배터리보다 훨씬 높습니다.특별한 디자인은 작지만 강력한 전원이 필요한 가제트에 적합합니다.이 기사는 A23 배터리의 기능, 성능 및 사용을 살펴 봅니다.다른 브랜드와 기타 일반적인 배터...1월1일에서 52108
핫 부품 번호
-

GRM0335C1H9R8DA01D
Murata Electronics
CAP CER 9.8PF 50V C0G/NP0 0201
QTLP630C7TR
onsemi
LED RED CLEAR 0805 SMD
LP2982IM5-5.0
Texas Instruments
IC REG LINEAR 5V 50MA SOT23-5
MAX9171EKA+T
Analog Devices Inc./Maxim Integrated
IC RECEIVER 0/1 SOT23-8
CLF10040T-331M
TDK Corporation
FIXED IND 330UH 530MA 1.032 OHM
1206YD225MAT4A
KYOCERA AVX
CAP CER 2.2UF 16V X5R 1206
RXH125N03TB1
Rohm Semiconductor
MOSFET N-CH 30V 12.5A 8SOP
MC908QT2AMDWE
NXP USA Inc.
IC MCU 8BIT 1.5KB FLASH 8SO
EVK105CH1R3BW-F
Taiyo Yuden
CAP CER 1.3PF 16V C0H 0402
RT9172-25GG
Richtek USA Inc.
IC REG LINEAR 2.5V 3A SOT223
SIT8920BM-12-33E-25.000000
SiTime
MEMS OSC XO 25.0000MHZ LVCMOS
LT3506EFE#PBF
Analog Devices Inc.
IC REG BUCK ADJ 1.6A DL 16TSSOP
MKI50-12E7
IXYS
IGBT MODULE 1200V 90A 350W E2
74VHC14N
onsemi
IC INVERT SCHMITT 6CH 1-IN 14DIP
EP7312-IB
Cirrus Logic Inc.
IC MPU EP7 74MHZ 256BGA
TDA75610S-QLX
STMicroelectronics
IC AMP AB QUAD 45W 27FLEXIWATT
RT9011-KSGQWC
Richtek USA Inc.
IC REG LINEAR 2.6V/3.3V 6WDFN
IGW50N65F5
Infineon Technologies
IGBT 650V 80A 305W PG-TO247-3 -

3269W-1-102LF
Bourns Inc.
TRIMMER 1K OHM 0.25W GW TOP ADJ
MOC3021S
Lite-On Inc.
OPTOISOLATOR 5KV TRIAC 6SMD
BTS441TGATMA1
Infineon Technologies
IC PWR SWITCH N-CHAN 1:1 TO263-5
12067A430JAT2A
KYOCERA AVX
CAP CER 43PF 500V NP0 1206
M24M01-RCS6TP/A
STMicroelectronics
IC EEPROM 1MBIT I2C 1MHZ 8WLCSP
RF4E110BNTR
Rohm Semiconductor
MOSFET N-CH 30V 11A HUML2020L8
TFS760HG
Power Integrations
IC OFFLIN CONV MULT TOP ESIP-16B
TPS3836L30DBVR
Texas Instruments
IC SUPERVISOR 1 CHANNEL SOT23-5
IPP80N06S3L-08
Infineon Technologies
MOSFET N-CH 55V 80A TO220-3
LT1637MPS8#PBF
Analog Devices Inc.
IC OPAMP GP 1 CIRCUIT 8SO
DA2S10100L
Panasonic Electronic Components
DIODE GP 80V 100MA SSMINI2-F5-B
STL75N3LLZH5
STMicroelectronics
MOSFET N-CH 30V 75A POWERFLAT
P0109AL 5AA4
STMicroelectronics
SCR 100V 250MA SOT23-3L
ISL6609ACRZ-T
Renesas Electronics America Inc
IC GATE DRVR HALF-BRIDGE 8QFN
REF192GSZ-REEL7
Analog Devices Inc.
IC VREF SERIES 0.4% 8SOIC
P6KE51A
Taiwan Semiconductor Corporation
TVS DIODE 43.6VWM 70.1VC DO15
CL05C390JB5NNNC
Samsung Electro-Mechanics
CAP CER 39PF 50V C0G/NP0 0402
AD8692WARMZ-REEL
Analog Devices Inc.
IC OPAMP GP 2 CIRCUIT 8MSOP -

TDA4863-2
Infineon Technologies
IC PFC CTRLR DCM 8DIP
7445630
Würth Elektronik
FIXED IND 1MH 400MA 3.9 OHM SMD
AP1117D15L-13
Diodes Incorporated
IC REG LINEAR 1.5V 1A TO252-3
MM74HC04N
onsemi
IC INVERTER 6CH 1-INP 14DIP
LTC4257IS8-1#TRPBF
Analog Devices Inc.
IC POE CNTRL 1 CHANNEL 8SOIC
EPM7064AEFC100-10
Intel
IC CPLD 64MC 10NS 100FBGA
SI3900DV-T1-GE3
Vishay Siliconix
MOSFET 2N-CH 20V 2A 6-TSOP
LT1168AIS8#TRPBF
Analog Devices Inc.
IC INST AMP 1 CIRCUIT 8SO
L4981BD013TR
STMicroelectronics
IC PFC CTR AVER CURR 100KHZ 20SO
HMK316B7473KL-T
Taiyo Yuden
CAP CER 0.047UF 100V X7R 1206
XR22801IL32-F
MaxLinear, Inc.
IC CONTROLLER ETHERNET 32QFN
TPSMB43CA
Littelfuse Inc.
TVS DIODE 36.8VWM 59.3VC DO214AA
BR24G64NUX-3TTR
Rohm Semiconductor
IC EEPROM 64KBIT VSON008X2030
08053A120KAT2A
KYOCERA AVX
CAP CER 12PF 25V NP0 0805
RC0402JR-07100RL
Yageo
RES SMD 100 OHM 5% 1/16W 0402
M1MA141WAT1G
onsemi
DIODE ARRAY GP 40V 100MA SC70-3
MAX2741ETI+T
Analog Devices Inc./Maxim Integrated
RF RECEIVER 1575.42MHZ 28TQFN
CD4093BCN
onsemi
IC GATE NAND 4CH 2IN 14DIP