FPGA와 마이크로컨트롤러: 알아야 할 주요 차이점
PCB 설계 작업을 할 때 시스템 요구 사항에 따라 FPGA와 마이크로컨트롤러 중에서 선택하는 경우가 많습니다.이 문서에서는 각각의 정의, 작동 방식, 내부의 주요 구성 요소에 대해 설명합니다.또한 시스템 구조와 프로그래밍 접근 방식이 어떻게 다른지 확인할 수 있습니다.이러한 기본 사항을 이해하면 어느 것이 프로젝트에 더 적합한지 결정할 수 있습니다.카탈로그
그림 1. FPGA와 마이크로컨트롤러 개요
FPGA와 마이크로컨트롤러란 무엇입니까?
안 FPGA (Field-Programmable Gate Array)는 제조 후 디지털 로직을 구성할 수 있는 집적 회로 유형입니다.병렬 신호 처리 경로 또는 특수 제어 논리 생성과 같이 맞춤형 하드웨어 동작이 필요할 때 PCB 설계에 널리 사용됩니다.소프트웨어 명령을 실행하는 대신 FPGA는 설계를 기반으로 하드웨어 회로를 구축합니다.따라서 하드웨어 수준에서 정확한 타이밍과 유연성이 필요한 작업에 적합합니다.PCB 시스템에서는 메모리, 센서 및 통신 인터페이스에 연결되는 프로그래밍 가능한 논리 코어 역할을 합니다.FPGA 장치를 사용하여 보드에 맞춤형 디지털 시스템을 직접 구현하십시오.
에이 마이크로컨트롤러 전자 시스템을 제어하기 위해 프로그래밍된 명령을 실행하도록 설계된 소형 집적 회로입니다.일반적으로 단일 칩에 프로세서, 메모리 및 입/출력 인터페이스가 포함되어 있어 임베디드 PCB 애플리케이션에 이상적입니다.마이크로컨트롤러는 일반적으로 입력을 읽고, 데이터를 처리하고, LED, 모터 또는 센서와 같은 출력을 제어하는 데 사용됩니다.소프트웨어에 작성된 일련의 지침에 따라 순차적으로 작동합니다.PCB 설계에서는 간단한 장치부터 복잡한 시스템에 이르기까지 많은 장치의 주요 제어 장치 역할을 합니다.단순성과 통합으로 인해 제어 중심 작업에 널리 사용됩니다.
FPGA 및 마이크로컨트롤러의 구성 요소
FPGA 구성요소
• 논리 블록(구성 가능한 논리 블록 - CLB)
이는 디지털 작업을 수행하는 FPGA의 핵심 구성 단위입니다.각 논리 블록에는 LUT(조회 테이블), 플립플롭 및 멀티플렉서가 포함되어 있습니다.LUT는 진리표를 저장하여 조합 논리 기능을 구현하는 데 사용됩니다.플립플롭은 순차 논리 및 타이밍 제어를 위한 저장소를 제공합니다.이러한 요소를 함께 사용하면 FPGA가 맞춤형 디지털 회로를 형성할 수 있습니다.
• 프로그래밍 가능한 상호 연결
인터커넥트는 FPGA 내의 다양한 로직 블록을 연결하는 라우팅 경로입니다.이를 통해 구성된 설계에 따라 논리 요소 간에 신호가 이동할 수 있습니다.이러한 연결은 유연하며 다양한 회로 레이아웃에 맞게 다시 프로그래밍할 수 있습니다.라우팅 네트워크는 신호가 올바른 목적지에 효율적으로 도달하도록 보장합니다.이 구조로 인해 고정된 배선 없이 복잡한 회로 작성이 가능합니다.
• 입출력(I/O) 블록
I/O 블록은 FPGA를 PCB의 외부 구성 요소에 연결합니다.센서, 메모리, 프로세서와 같은 장치와의 통신을 처리합니다.이 블록은 다양한 전압 레벨과 신호 표준을 지원합니다.입력, 출력 또는 양방향 포트로 구성할 수 있습니다.이러한 유연성을 통해 다양한 외부 시스템과 원활하게 통합할 수 있습니다.
• 클록 관리 장치
클럭 관리 장치는 FPGA 내부의 타이밍과 동기화를 제어합니다.그들은 클럭 신호를 생성하고 칩의 다른 부분에 분배합니다.이러한 장치에는 PLL(위상 고정 루프) 또는 DLL(지연 고정 루프)이 포함될 수 있습니다.안정적인 작동을 위해 안정적인 타이밍을 유지하는 데 도움이 됩니다.적절한 클럭 제어는 설계 전반에 걸쳐 정확한 데이터 처리를 보장합니다.
• 내장형 메모리 블록(BRAM)
임시 데이터 저장에 사용되는 내장 메모리 장치입니다.이를 통해 FPGA 내에서 자주 사용되는 데이터에 빠르게 액세스할 수 있습니다.블록 RAM은 다양한 크기와 모드로 구성될 수 있습니다.버퍼링, 캐싱 및 데이터 처리 작업을 지원합니다.이는 일부 설계에서 외부 메모리의 필요성을 줄여줍니다.
마이크로컨트롤러 구성요소
• 중앙처리장치(CPU)
CPU는 명령을 실행하는 주요 처리 장치입니다.산술, 논리 및 제어 작업을 수행합니다.CPU는 메모리에서 명령을 읽고 이를 단계별로 처리합니다.시스템 내의 데이터 흐름을 관리합니다.이는 마이크로컨트롤러의 핵심 컨트롤러가 됩니다.
• 메모리(플래시, RAM, EEPROM)
마이크로컨트롤러에는 코드와 데이터를 저장하기 위한 다양한 유형의 메모리가 포함되어 있습니다.플래시 메모리는 프로그램을 영구적으로 저장합니다.RAM은 실행 중 임시 데이터로 사용됩니다.EEPROM은 소량의 비휘발성 데이터를 저장하는 데 사용됩니다.각 유형은 시스템 작동에서 특정 역할을 수행합니다.함께, 안정적인 데이터 처리를 지원합니다.
• 타이머 및 카운터
타이머와 카운터는 시간 기반 작업에 사용됩니다.지연을 생성하고, 시간 간격을 측정하고, 정기적인 작업을 제어하는 데 도움이 됩니다.이러한 구성 요소는 PWM 신호 생성과 같은 기능에 중요합니다.또한 이벤트 계산 및 예약도 지원합니다.이는 제어 및 자동화 시스템에 유용합니다.
• 입력/출력 포트(GPIO)
GPIO 핀을 사용하면 마이크로 컨트롤러가 외부 장치와 상호 작용할 수 있습니다.애플리케이션에 따라 입력 또는 출력으로 구성할 수 있습니다.이 포트는 센서에서 신호를 읽거나 신호를 액추에이터로 보냅니다.다른 구성 요소와의 디지털 통신을 지원합니다.GPIO는 시스템 연결에 적합합니다.
• 통신 인터페이스
마이크로컨트롤러에는 UART, SPI 및 I2C와 같은 내장 통신 모듈이 포함되어 있습니다.이러한 인터페이스를 통해 다른 장치와의 데이터 교환이 가능합니다.이는 임베디드 시스템에서 일반적으로 사용되는 직렬 통신 프로토콜을 지원합니다.이를 통해 센서, 디스플레이 및 기타 컨트롤러에 연결할 수 있습니다.이러한 인터페이스는 시스템 통합을 단순화합니다.
FPGA 및 마이크로컨트롤러 시스템의 블록 다이어그램
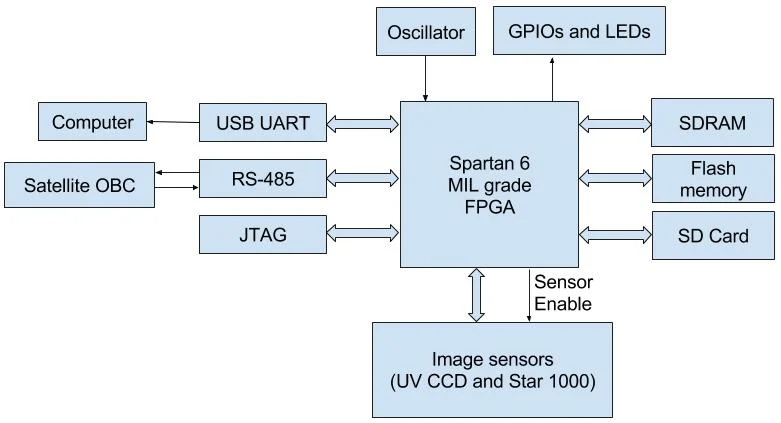
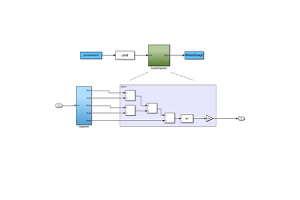
그림 2. FPGA 블록 다이어그램
FPGA 블록 다이어그램은 유연한 인터페이스를 통해 여러 외부 구성 요소에 연결된 중앙 프로그래밍 가능 장치를 보여줍니다.일반적으로 데이터 처리를 위해 SDRAM 및 플래시 스토리지와 같은 메모리 모듈에 연결됩니다.UART, RS-485 및 JTAG와 같은 통신 인터페이스를 통해 외부 시스템 및 디버깅 도구와 상호 작용할 수 있습니다.다이어그램에는 센서 및 제어 신호에 대한 입력/출력 연결도 포함되어 있습니다.클록 소스는 동기화된 작동을 보장하기 위해 타이밍 신호를 제공합니다.이 구조는 FPGA가 시스템에서 중앙 로직 허브 역할을 하는 방식을 강조합니다.고정된 내부 아키텍처 없이 주변 장치 간의 데이터 흐름을 관리합니다.

그림 3. 마이크로컨트롤러 블록 다이어그램
마이크로 컨트롤러 블록 다이어그램은 버스 시스템을 통해 내부 메모리 및 주변 장치에 연결된 중앙 처리 장치를 보여줍니다.CPU는 ROM 및 RAM과 통신하여 명령을 실행하고 저장합니다.입력/출력 포트를 통해 센서, 디스플레이 등 외부 장치와 상호 작용할 수 있습니다.타이머와 카운터는 시스템 내에서 타이밍 관련 작업을 처리합니다.발진기는 전체 작업을 구동하는 클록 신호를 제공합니다.인터럽트 제어는 외부 및 내부 이벤트 처리를 관리합니다.이 구조는 제어 작업을 위해 설계된 컴팩트하고 통합된 시스템을 보여줍니다.
FPGA의 장점과 단점
|
장점 |
단점 |
|
유연성이 뛰어남
하드웨어 구성을 통해 맞춤형 디지털 회로 설계가 가능합니다. |
복잡한 디자인
하드웨어 설명 언어가 필요한 프로세스. |
|
사실을 지원합니다
고속 작업을 위한 병렬 처리. |
더 높은 비용
단순한 임베디드 솔루션과 비교됩니다. |
|
재프로그래밍 가능
다양한 응용 프로그램에 대해 여러 번. |
더 길다
설계 및 테스트로 인한 개발 시간. |
|
처리할 수 있다
복잡한 신호 처리 및 데이터 작업. |
필요하다
전문 도구와 전문 지식. |
|
확장 가능
고급 시스템에 적합한 아키텍처. |
더 높은 전력
일부 디자인의 소비. |
마이크로컨트롤러의 장점과 단점
|
장점 |
단점 |
|
저렴한 비용과
많은 응용 분야에 널리 사용 가능합니다. |
제한적
복잡한 작업을 위한 처리 능력. |
|
프로그래밍하기 쉬움
C/C++와 같은 공용 언어를 사용합니다. |
순차
실행은 병렬 처리를 제한합니다. |
|
통합
구성 요소는 외부 하드웨어 요구 사항을 줄입니다. |
제한된 메모리
더 큰 시스템에 비해. |
|
저전력
휴대용 장치에 적합한 소비. |
유연성이 떨어짐
하드웨어 구성. |
|
빠른 개발
임베디드 시스템의 사이클. |
성능
고정 아키텍처에 따라 다릅니다. |
코드 비교: FPGA와 마이크로컨트롤러 프로그래밍

FPGA 코드 예제에서는 VHDL과 같은 하드웨어 설명 언어를 사용하여 회로 동작을 정의합니다.명령을 작성하는 대신 코드는 신호가 어떻게 변경되고 상호 작용하는지 설명합니다.이는 입력, 출력 및 시스템이 클록 신호에 응답하는 방식을 정의합니다.구조에는 설계를 구성하는 엔터티와 아키텍처가 포함됩니다.프로세스 블록은 클럭 에지와 같은 이벤트를 기반으로 신호가 업데이트되는 방식을 제어합니다.이 접근 방식은 순차적 명령을 실행하는 대신 하드웨어 동작을 직접 모델링합니다.이를 통해 FPGA 내부에 맞춤형 디지털 로직을 생성할 수 있습니다.
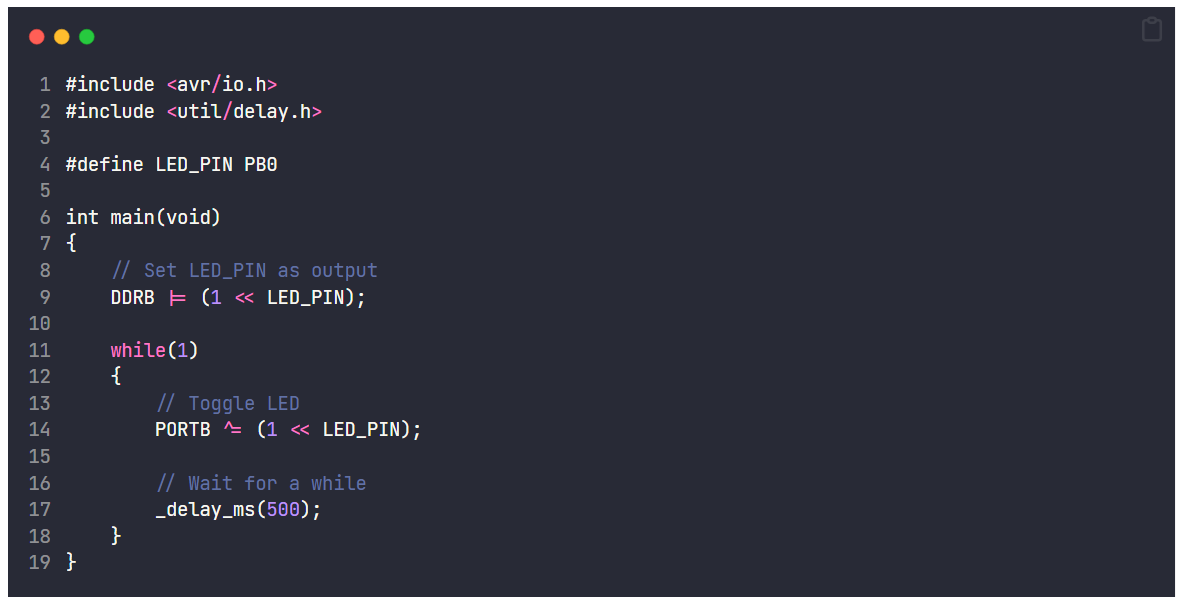
마이크로 컨트롤러 코드 예제에서는 C와 같은 프로그래밍 언어를 사용하여 명령을 단계별로 실행합니다.하드웨어 레지스터를 설정하고 핀 구성을 정의하는 것으로 시작됩니다.main 함수는 지속적으로 실행되어 루프에서 작업을 수행합니다.명령은 LED를 켜고 끄는 것과 같은 출력을 제어합니다.지연 기능은 타이밍 효과를 생성하는 데 사용됩니다.이 접근 방식은 순차적 실행 모델을 따릅니다.간단하고 임베디드 시스템 프로그래밍에 널리 사용됩니다.
FPGA 및 마이크로컨트롤러의 응용
1. 산업자동화 시스템
FPGA는 산업 기계의 제어 및 신호 처리에 사용됩니다.고속 데이터와 정확한 타이밍 요구 사항을 처리합니다.마이크로컨트롤러는 자동화 시스템의 센서, 모터 및 제어 로직을 관리합니다.이를 통해 안정적이고 효율적인 운영이 가능해집니다.이 조합은 시스템 성능과 제어를 향상시킵니다.
2. 가전제품
마이크로컨트롤러는 세탁기, TV, 리모콘과 같은 장치에 널리 사용됩니다.사용자 입력과 시스템 기능을 효율적으로 관리합니다.FPGA는 비디오 처리 장치와 같이 빠른 데이터 처리가 필요한 고급 장치에 사용됩니다.이러한 애플리케이션은 컴팩트하고 효율적인 설계의 이점을 누리고 있습니다.두 기술 모두 최신 전자 제품을 지원합니다.
3. 통신 시스템
FPGA는 데이터 라우팅 및 신호 처리를 위한 네트워킹 장비에 사용됩니다.고속 통신 프로토콜을 지원합니다.마이크로컨트롤러는 통신 장치의 제어 및 모니터링 기능을 처리합니다.이러한 역할은 안정적이고 효율적인 데이터 전송을 보장합니다.이는 현대 통신 인프라에서 중요합니다.
4. 의료기기
마이크로컨트롤러는 심장 모니터 및 주입 펌프와 같은 장치의 기능을 제어합니다.안정적인 저전력 작동을 보장합니다.FPGA는 빠른 데이터 처리를 위해 이미징 시스템에 사용됩니다.이러한 애플리케이션에는 정확성과 신뢰성이 필요합니다.두 기술 모두 의료 시스템을 지원합니다.
5. 자동차 시스템
마이크로컨트롤러는 엔진 제어 장치, 센서 및 안전 시스템을 관리합니다.효율적인 차량 작동을 보장합니다.FPGA는 데이터 처리를 위한 고급 운전자 지원 시스템에 사용됩니다.이러한 시스템은 안전성과 성능을 향상시킵니다.자동차 전자 장치는 두 기술 모두에 크게 의존합니다.
6. 항공우주 및 국방
FPGA는 고속 데이터 처리 및 보안 통신 시스템에 사용됩니다.복잡한 신호 분석 및 제어 작업을 지원합니다.마이크로컨트롤러는 임베디드 시스템의 모니터링 및 제어 기능을 처리합니다.이러한 응용 분야에는 높은 신뢰성과 정밀도가 필요합니다.두 기술 모두 미션 크리티컬 시스템에서 중요한 역할을 합니다.
FPGA vs 마이크로컨트롤러 vs CPLD
|
특징 |
FPGA |
마이크로컨트롤러 |
CPLD |
|
논리 자원 |
~10K ~ >10M
논리 게이트(또는 LUT) |
해당 없음
(CPU 기반) |
~1K ~ ~100K
게이트 |
|
클럭 속도 |
~50MHz ~ 500+
MHz(설계에 따라 다름) |
~1MHz ~ 600
MHz(일반 MCU)
|
~50MHz ~ 200
MHz |
|
처리 스타일 |
진정한 병렬
하드웨어 실행 |
순차
명령 실행 |
제한된 병렬
논리 |
|
구성
방법 |
SRAM/플래시 기반
시작 시 로드된 비트스트림 |
펌웨어가 저장됨
플래시 메모리에서 |
비휘발성
구성(EEPROM/플래시) |
|
프로그래밍
언어 |
VHDL, Verilog
(HDL) |
C, C++, 어셈블리 |
VHDL, Verilog |
|
내부 메모리 |
블록 RAM: ~10
KB에서 수 MB까지 |
플래시: ~8KB–2
MB, RAM: ~2KB~512KB |
매우 제한적
(몇 KB에 해당) |
|
I/O 핀 |
~50~1000+
구성 가능한 I/O |
~6~200 GPIO
핀 |
~30~500개의 I/O |
|
힘
소비 |
~1W ~ 10+W
(크기/디자인에 따라 다름) |
~1mW ~ 500mW |
~10mW ~ 1W |
|
부팅 시간 |
ms에서 초로
(구성 로드 필요) |
µs 에 ms
(플래시에서 즉시) |
인스턴트
(비휘발성) |
|
디자인 출품 |
하드웨어 회로
정의 |
소프트웨어 프로그램
개발 |
논리 설계
(FPGA보다 간단함) |
|
외부
구성요소 |
종종 요구
외부 메모리(DDR, 플래시) |
최소(보통
독립형) |
최소한의 외부
구성 요소 |
|
재구성 |
완전히
재프로그래밍 가능, 무제한 사이클 |
재프로그래밍 가능
펌웨어 |
재프로그래밍 가능
하지만 제한된 크기 |
|
일반적인 사용
규모 |
복잡성이 높음
디지털 시스템 |
소형에서 중형까지
임베디드 시스템 |
작은 제어
및 인터페이스 로직 |
|
개발
주기 |
몇 주에서 몇 달까지 |
며칠에서 몇 주까지 |
며칠에서 몇 주까지 |
결론
FPGA와 마이크로컨트롤러는 주로 데이터 처리 방식이 다르며, FPGA는 병렬 하드웨어 기반 실행을 제공하고 마이크로컨트롤러는 순차 소프트웨어 제어에 의존합니다.내부 구성 요소, 시스템 구조 및 프로그래밍 방법은 이러한 차이점을 반영하여 각각을 특정 응용 프로그램에 적합하게 만듭니다.FPGA는 고속의 맞춤형 로직 작업에 탁월한 반면, 마이크로컨트롤러는 제어 중심의 비용 효율적인 설계에 이상적입니다.이들은 자동화, 통신, 자동차, 의료 시스템 등 산업 전반에서 중요한 역할을 수행합니다.
우리에 대해
ALLELCO LIMITED
더 많은 것을 읽으십시오
빠른 문의
문의를 보내 주시면 즉시 응답하겠습니다.
자주 묻는 질문 [FAQ]
1. FPGA가 PCB 설계에서 마이크로컨트롤러를 대체할 수 있습니까?
예, 하지만 응용 프로그램에 따라 다릅니다.FPGA는 제어 기능을 복제할 수 있지만 간단한 작업의 경우 마이크로컨트롤러에 비해 더 복잡하고 비용이 많이 드는 경우가 많습니다.
2. 마이크로컨트롤러가 FPGA보다 전력 효율성이 더 높은 이유는 무엇입니까?
마이크로컨트롤러는 통합 구성요소와 절전 모드를 통해 저전력 작동에 최적화되어 있습니다.FPGA는 구성 가능한 로직 및 병렬 처리로 인해 더 많은 전력을 소비합니다.
3. FPGA에는 마이크로컨트롤러와 같은 운영 체제가 필요합니까?
아니요, FPGA는 하드웨어 로직을 직접 구현하기 때문에 운영 체제가 필요하지 않습니다.마이크로컨트롤러는 OS 없이 실행될 수 있지만 복잡한 애플리케이션에는 OS를 사용할 수도 있습니다.
4. 하나의 시스템에서 FPGA와 마이크로컨트롤러를 모두 사용할 수 있습니까?
예, 많은 시스템이 두 가지를 모두 결합합니다.FPGA는 고속 처리를 처리하고 마이크로컨트롤러는 제어 및 통신 작업을 관리합니다.
5. FPGA 및 마이크로컨트롤러 개발에는 어떤 프로그래밍 언어가 사용됩니까?
FPGA는 VHDL 또는 Verilog와 같은 하드웨어 설명 언어를 사용하는 반면 마이크로컨트롤러는 일반적으로 C 또는 C++를 사용하여 프로그래밍됩니다.
초보자를 위한 광커플러 전체 가이드
3월30일에서
PCB용 방열판 부착 방법 및 선택 가이드
3월27일에서
인기있는 게시물
-

복잡한 명령 세트 컴퓨터 : 컴퓨터를 어떻게 변경 했습니까?
4월18일에서 147776
-

USB-C 핀아웃 및 기능
4월18일에서 112022
-
Xilinx Unified Simulation Primitive 사용 : FPGA 설계 및 시뮬레이션에 대한 포괄적 인 안내서
4월18일에서 111351
-
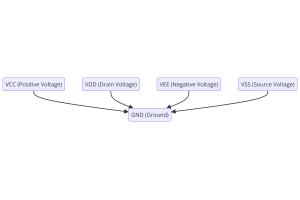
전자 장치의 전원 공급 장치 전압: VCC, VDD, VEE, VSS 및 GND의 의미
4월18일에서 83777
-

RJ45 커넥터 가이드 : 핀아웃, 배선, 케이블 유형 및 사용
1월1일에서 79577
-
현대 전기 시스템에서 와이어 컬러 코드에 대한 궁극적 인 가이드
전기 시스템이 색상을 사용하는 방식은 외관만을위한 것이 아닙니다.각 와이어 색상은 이제 특정 기능을 나타내므로 설치 및 유지 보수 중에 전기 부품을보다 쉽게 식별하고 처리 할 수 있습니다.이는 운영 프로세스를 가속화 할뿐만 아니라 실수의 기회를 줄이고 사용자와 기술자 모두가 안전하게 지내도록 도와줍니다.이 기사는 와이어 컬러 코드의 중요성, 안...1월1일에서 66964
-

퍼지 밸브 가이드 : 최적의 엔진 성능을위한 기능, 증상, 테스트 및 교체
퍼지 밸브는 대기로 빠져 나가기 전에 연료 증기를 관리함으로써 공기를 깨끗하게 유지하는 데 도움이되는 자동차 시스템의 핵심 부분입니다.이것은 오염을 줄임으로써 환경에 도움이 될뿐만 아니라 자동차를 개선하고 연료를보다 효율적으로 사용하게합니다.이 기사에서는 퍼지 밸브가 작동하는 방식, 유형 및 제대로 작동하는지 확인하는 방법을 포함하여 Purge 밸브에...1월1일에서 63104
-
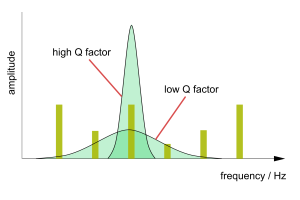
품질 (Q) 요인 : 방정식 및 응용
RF (Radio Frequencies)를 사용하는 전자 시스템에서 인덕터와 공진기가 얼마나 잘 작동하는지 확인할 때 품질 요소 또는 'Q'가 중요합니다.'Q'는 회로가 에너지 손실을 최소화하고 시스템이 주요 주파수 주변에서 처리 할 수있는 주파수 범위에 얼마나 잘 영향을 미치는지 측정합니다.인덕터, 커패시터 및 조정 된 회로가있는 시스템에서 더 높은...1월1일에서 63041
-
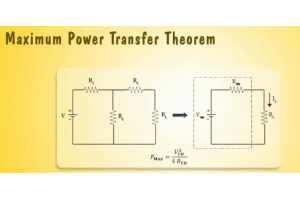
최대 전력 전송 정리로 피크 성능을 달성합니다
최대 전력 전송 정리는 배터리 또는 발전기와 같은 소스의 에너지가 연결 하중으로 흐르는 방법을 설명합니다.부하가 가장 많은 전력을받는 정확한 조건을 보여줍니다.이 기사는 정리의 의미, DC 및 AC 회로에서 작동하는 방식, 배후의 증거, 실제 응용 프로그램 및 장점 및 단점을 다룹니다.결국,이 원리가 태양 전지판, 라디오, 스피커 및 무선 충전과 같은...1월1일에서 54097
-
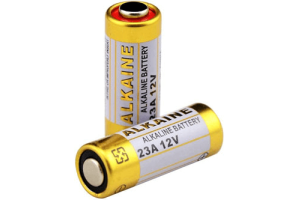
A23 배터리 사양 및 호환성
A23 배터리는 전압이 높은 작은 실린더 모양의 배터리입니다.23A, 23AE 또는 MN21이라고도하는 경우에도 12 볼트로 작동하며 AA 또는 AAA 배터리보다 훨씬 높습니다.특별한 디자인은 작지만 강력한 전원이 필요한 가제트에 적합합니다.이 기사는 A23 배터리의 기능, 성능 및 사용을 살펴 봅니다.다른 브랜드와 기타 일반적인 배터...1월1일에서 52190
핫 부품 번호
-

PIC16LF1707-I/P
Microchip Technology
IC MCU 8BIT 3.5KB FLASH 20DIP
S-8211CAS-I6T1U
ABLIC Inc.
IC BATT PROT LI-ION 1CELL SNT-6A
TP3067BDW
Texas Instruments
IC COMBO CODEC/FILTER 20-SOIC
HVD368BKRF-E
Renesas Electronics America Inc
VARIABLE CAPACITANCE DIODE
LM3695YFQR
Texas Instruments
PROTOTYPE
MTFC64GAPALNA-AIT
Micron Technology Inc.
EMMC 512GBIT MMC5.1 J58X AT
2DD2678-13
Diodes Incorporated
TRANS NPN 12V 3A SOT89-3
SI1865DL-T1-E3
Vishay Siliconix
IC PWR SWITCH P-CHAN 1:1 SC70-6
GAL20V8B-15LJN
Lattice Semiconductor Corporation
IC CPLD 8MC 15NS 28PLCC
SMAJ75A-E3/61
Vishay General Semiconductor - Diodes Division
TVS DIODE 75VWM 121VC DO214AC
MK20DX256VLQ10R
NXP USA Inc.
IC MCU 32BIT 256KB FLASH 144LQFP
CC0603CRNPO0BN3R3
YAGEO
CAP CER 3.3PF 100V C0G/NPO 0603
GRM188R61A224KA01D
Murata Electronics
CAP CER 0.22UF 10V X5R 0603
NVMFS5C430NLWFT1G
onsemi
MOSFET N-CH 40V 200A 5DFN
BZV55-C12,115
Nexperia USA Inc.
DIODE ZENER 12V 500MW LLDS
725964-2
TE Connectivity AMP Connectors
CONN QC TAB 0.250 SOLDER
GRM1887U2A3R7CZ01D
Murata Electronics
CAP CER 3.7PF 100V U2J 0603
SN74LV4066ADRG4
Texas Instruments
IC SWITCH QUAD 1X1 14SOIC -

VUC25-14GO2
IXYS
BRIDGE RECT 3P 1.4KV 25A KAMM
SMAJ70A
Bourns Inc.
TVS DIODE 70VWM 113VC SMA
GRM1555C2A1R5CA01D
Murata Electronics
CAP CER 1.5PF 100V C0G/NP0 0402
DG441DJ
Analog Devices Inc./Maxim Integrated
IC SWITCH SPST-NCX4 85OHM 16DIP
PCA9535BS,118
NXP USA Inc.
IC XPND 400KHZ I2C SMBUS 24HVQFN
0402YC103KA72A
KYOCERA AVX
CAP CER 10000PF 16V X7R 0402
RN2962(TE85L,F)
Toshiba Semiconductor and Storage
TRANS 2PNP PREBIAS 0.2W US6
ADDAC80N-CBI-V
Analog Devices Inc.
IC DAC 12BIT V-OUT 24DIP
MT29C4G96MAZBACKD-5 WT
Micron Technology Inc.
IC FLASH RAM 4GBIT PAR 137TFBGA
DM74ALS373WMX
Fairchild Semiconductor
BUS DRIVER
GRM2197U2A6R3DD01D
Murata Electronics
CAP CER 6.3PF 100V U2J 0805
EM357-RTR
Silicon Labs
IC RF TXRX+MCU 802.15.4 48VFQFN
04025A220JAT2A
KYOCERA AVX
CAP CER 22PF 50V C0G/NP0 0402
V250LA10P
Littelfuse Inc.
VARISTOR 390V 2.5KA DISC 10MM
GRM1886R1H7R8DZ01D
Murata Electronics
CAP CER 7.8PF 50V R2H 0603
ST72F324LJ4T6
STMicroelectronics
IC MCU 8BIT 16KB FLASH 44LQFP
749069-9
TE Connectivity AMP Connectors
CONN D-TYPE RCPT 100P VERT SLDR
TMDS261BPAG
Texas Instruments
IC VIDEO HDMI/DVI SWITCH 64TQFP -

74VCX162373MTDX
onsemi
IC LATCH TRANSP 16BIT LV 48TSSOP
AD5311BRMZ-REEL7
Analog Devices Inc.
IC DAC 10BIT V-OUT 8MSOP
LMV721M7
Texas Instruments
IC OPAMP GP 1 CIRCUIT SC70-5
10M02DCU324I7G
Intel
IC FPGA 160 I/O 324UBGA
NR4018T151M
Taiyo Yuden
FIXED IND 150UH 220MA 3 OHM SMD
SI2300DS-T1-GE3
Vishay Siliconix
MOSFET N-CH 30V 3.6A SOT23-3
TAS3002PFB
Texas Instruments
IC AUDIO SIGNAL PROCESSOR 48TQFP
GCJ32EL81E475KA01L
Murata Electronics
CAP CER 4.7UF 25V X8L 1210
UCC27524ADGN
Texas Instruments
IC GATE DRVR LOW-SIDE 8MSOP
FH42-31S-0.3SHW(10)
Hirose Electric Co Ltd
CONN FPC TOP 31POS 0.3MM R/A
ZXTN4002ZTA
Diodes Incorporated
TRANS NPN 100V 1A SOT89-3
NCP81216MNTXG
onsemi
IC SWITCHING CONTROLLER QFN
MAX154BCNG+
Analog Devices Inc./Maxim Integrated
IC ADC CMOS 8BIT W/MUX&REF 24DIP
LX1682CDM
Microsemi Corporation
IC REG CTRLR BUCK 8SOIC
1827569-2
TE Connectivity AMP Connectors
CONN SOCKET 28-30AWG CRIMP GOLD
VI-24Y-CW
Vicor Corporation
DC DC CONVERTER 3.3V 20W
NVD5407NT4G
onsemi
MOSFET N-CH 40V 7.6A/38A DPAK
DM74S182N
Fairchild Semiconductor
LOOK-AHEAD CARRY GENERATOR