SPI 통신 프로토콜에 대한 포괄적 인 안내서
이 기사에서는 효율적인 데이터 전송 기능 및 다양한 응용 프로그램에 중점을 둔 SPI (Serial Peripheral Interface) 프로토콜의 세부 사항을 살펴 봅니다.SPI는 마이크로 컨트롤러를 다양한 주변 장치와 연결하기 위해 임베디드 시스템에서 널리 사용되는 고속의 동기 통신 프로토콜입니다.마스터 슬레이브 구성과 4 개의 기본 라인 (Miso, Mosi, SCLK 및 CS)을 통해 SPI는 데이터 통신을 단순화하면서 장치 간의 동기화를 보장합니다.운영 역학, 하드웨어 구성, 타이밍 다이어그램 및 실제 설정 조언을 포함하여 SPI의 핵심 원칙을 파헤쳐 드리겠습니다.SPI를 처음 사용하든 이해를 개선하려고하든,이 게시물은 실제 응용 분야에서 잠재력을 극대화하는 데 대한 귀중한 통찰력을 제공합니다.목록

SPI 프로토콜의 개요
SPI (Serial Peripheral Interface)는 소프트웨어 오버 헤드를 줄임으로써 CPU 작업을 간소화하는 4 와이어 시스템을 사용합니다.속도와 효율성으로 유명한 SPI는 AT91RM9200과 같은 장치에서 기본입니다.마스터 슬레이브 프레임 워크에서 마스터는 4 개의 필요한 와이어를 통해 노예와 상호 연결하여 작업을 관리합니다.MISO 라인은 마스터로 다시 데이터를 채택하고 Mosi는 나가는 데이터를 관리합니다.SCLK는 마스터의 클록 신호를 제공하고 CS는 장치 활성화 제어를 용이하게합니다.SPI의 단순성은 단일 버스에서 여러 장치를 연결하고, 일련의 데이터 전송을 실행하며, 클럭 펄스를 통한 동기화를 달성하는 데 주로 유용합니다.여기서 마스터는 데이터 신뢰성에 영향을 미치지 않고 통신을 일시 중지 할 수 있습니다.SPI는 흐름 제어 및 데이터 승인 기능이 부족하지만 외부 디코더를 통해 주변 연결을 증가시키는 능력은 이러한 제한을 보상합니다.
SPI 사용의 특정 인스턴스
SPI는 레지스터 데이터 교환을위한 SS (CS), SCK, SDI 및 SDO와 같은 부품을 사용하여 독특한 링 버스 설정 주위에 구성됩니다.예를 들어, 8 비트 레지스터 전송은 클럭 에지를 사용하여 데이터 이동 및 레지스터 이동을 관리합니다.마스터 슬레이브 설정에서의 초기화는 트랜시버 버퍼를 사전 구성하여 통신 프로세스를 보여주는 것으로 시작합니다.Motorola의 SPI는 고급 송신 재조정 작업, 마스터 슬레이브 역할 간의 유연성 및 강력한 시계 기능을 위해 MOSI, MISO 및 SCK를 사용하여 동기 직렬 통신에 탁월합니다.장치는 통신 일관성을 위해 클럭 단계와 극성을 동기화해야합니다.SPI는 최대 256 개의 포트를 연결하는 용량을 통해 포인트 간 연결 및 패킷 기반 데이터 전송을 중심으로합니다.

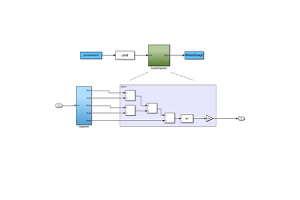
사용자 논리 공식
적응 가능한 사용자 로직 설계는 멀티 포트 구조를 특징으로하는 응용 프로그램의 경우 역동적입니다.듀얼 포트 구성 내에서 독립 FIFO는 포트 주소에 비해 데이터를 처리합니다.동시에 로직 중재는 데이터 구절을 SPI4 인터페이스로 감독하여 즉각적인 흐름 제어 데이터 및 FIFO 상태를 수용합니다.
SPI 운영 역학
SPI는 신뢰할 수있는 통신을 위해 설계되며, 전송시 데이터 및 흐름 제어를위한 개별 채널을 특징으로합니다.광범위한 포트 연결은 패킷 기반 데이터 전송을 허용하여 패킷 주소를 통한 지점 간 유효성 검사를 보장하여 적용 다목적 성을 확대합니다.

데이터 전송 타이밍 다이어그램 연구
SPI 인터페이스는 CPOL 및 CPHA 설정에 따라 4 개의 타이밍 다이어그램으로 특징 지어집니다.CPOL은 SCK의 유휴 상태를 정의하는 반면 CPHA는 샘플링 클럭 모서리를 지정합니다.이러한 구성은 데이터 정확도 및 동기화를 보장하기 위해 활성화됩니다.
동기 직렬 통신
Motorola가 시작한 SPI는 빠른 동기 통신을 위해 설계된 4 와이어의 양방향 직렬 버스로, 마이크로 컨트롤러를 EEPROM, RTC 및 A/D 변환기와 같은 주변 장치에 연결합니다.SPI 네트워크는 혼합 주변 장치를 능숙하게 연결하여 직접 이중 공동 교환을위한 메커니즘을 우회하는 프로토콜을 사용합니다.Int와 같은 추가 라인은 시스템 응답 성을 향상시킬 수 있습니다.
하드웨어 구성의 복잡성
SPI의 다양한 주변 장치와의 인터페이스 능력에도 불구하고, 각 장치에 대한 개별 신호는 I2C와 같은 단순한 시스템에 비해 복잡성을 초래합니다.이 복잡성은 SPI 하드웨어 구성의 본질적인 측면으로, 8 비트 데이터 전송에 대한 시프트 레지스터를 통합합니다.작동 중에 장치는 시계의 하락 가장자리를 사용하여 레지스터를 통해 비트를 안전하게 이동시킵니다.
역량과 실용성 평가
SPICLK, MOSI, MISO 및 NSS와 같은 요소를 사용하여 SPI 네트워크는 NSS 핀 상태를 기반으로 마스터 슬레이브 역할을 설정합니다.단일 또는 멀티 마스터 환경을 지원하는 프로토콜은 최대 16 개의 주변 장치를 제어하기 위해 적응합니다.흐름 제어 및 승인 방법이 부족하지만 프로토콜 구조는 다양한 연결 설정 및 통신을 효율적으로 수용합니다.
설정 및 타이밍의 삽화
SPI 데이터 트랜잭션은 SCK 관리의 영향을받는 간단한 타이밍 규칙에 의해 규제됩니다.예를 들어, 10101010과 같은 레지스터 패턴은 시계 구동 이동을 통해 데이터 비트 단위로 보냅니다. 링 버스의 작동 단순성 및 데이터 전환 역학을 강조합니다.
성능에 대한 통찰력 확대
마스터 및 슬레이브 장치의 SPI 클록 단계와 극성의 적절한 동기화는 진행중인 데이터 트랜잭션에 사용됩니다.CPOL 및 CPHA와 같은 매개 변수는 SPI 연결 시스템 내의 장치간에 연계되어 통신 하모니를 유지해야합니다.
실용적인 설정 조언
SPI 클록 구성에 대한 조정은 전송 사이클 동안 데이터 정확도를 보장하기 위해 슬레이브 장치의 클록 요구를 고려해야합니다.데이터 전송 중 신호 가장자리를 인식하는 것은 상호 연결 불일치를 방지하기 위해 심각합니다.제품 매뉴얼은 필요한 설정을 종종 자세히 설명하여 전송 정확도에 대한 정확한 낙지 정렬의 영향을 강조합니다.
SPI 커뮤니케이션의 기본 사항
핵심적으로 SPI (Serial Peripheral Interface)는 전이중, 동기식 직렬 통신 프로토콜 역할을하며 상호 작용을 위해 미리 배열이 필요합니다.이 기능은 본질적으로 동기화 된 교환을 강조하여 SPI를 차별화합니다.SPI의 주목할만한 측면은 마스터 장치가 시계 신호를 생성하고 통신을 시작하여 제어를 조정하는 마스터 슬레이브 모델에 대한 의존입니다.대조적으로, 슬레이브 장치는 소환 될 때 참여할 준비가 된이 신호에 대해 급격히 조정 된 상태를 유지합니다.
SPI 내 마스터와 슬레이브 장치 간의 협업 메커니즘은 세 심하게 구성되어 있습니다.마스터는 시계 관리에 대한 독점적 인 책임을지고 데이터 교환에 대한 꾸준한 리듬을 보장합니다.이 감독은 동기화를 간소화하여 비동기 시스템에 종종 존재하는 예측 성을 제거합니다.통일 된 시간 참조를 설정함으로써 두 장치는 정확도로 작업을 실행할 수 있으며 광범위한 응용 프로그램 경험을 통해 연습을 개선 할 수 있습니다.SPI의 질서있는 특성은 효율적인 데이터 전송 기능을 제공하여보다 복잡한 프로토콜에 대한 간단한 대안을 제공합니다.
SPI의 프레임 워크는 특히 플러그 앤 플레이의 용이성을 강조하는 설정에서 특정 제약 조건을 보여줍니다.프로토콜의 융통성없는 특성은 호환성이 미리 세 심하게 배열되어야한다는 것을 의미합니다.시계 신호 및 미리 정해진 프로토콜 계약의 권한에 따라 SPI 구성 기능 내의 장치.이렇게하면 동기화가 단순화되지만 초기 설정 노력이 필요합니다.이러한 원칙을 능숙하게 적용하면 의사 소통 불일치를 완화 할 수있는 잠재력이 입증되었습니다.세션 평가에서 관찰 된 바와 같이, SPI의 구조적 엄격함을 파악하면 실제 배치를 향상시킬뿐만 아니라 응용 프로그램 정확도도 향상시킵니다.
우리에 대해
ALLELCO LIMITED
더 많은 것을 읽으십시오
빠른 문의
문의를 보내 주시면 즉시 응답하겠습니다.
UDP에 관한 모든 것 : 연결없는 의사 소통을위한 안내서
12월30일에서

HD 기술 : 시각적 우수성 향상
12월30일에서
인기있는 게시물
-

복잡한 명령 세트 컴퓨터 : 컴퓨터를 어떻게 변경 했습니까?
4월18일에서 147757
-

USB-C 핀아웃 및 기능
4월18일에서 111938
-
Xilinx Unified Simulation Primitive 사용 : FPGA 설계 및 시뮬레이션에 대한 포괄적 인 안내서
4월18일에서 111349
-
전자 장치의 전원 공급 장치 전압: VCC, VDD, VEE, VSS 및 GND의 의미
4월18일에서 83721
-

RJ45 커넥터 가이드 : 핀아웃, 배선, 케이블 유형 및 사용
1월1일에서 79508
-
현대 전기 시스템에서 와이어 컬러 코드에 대한 궁극적 인 가이드
전기 시스템이 색상을 사용하는 방식은 외관만을위한 것이 아닙니다.각 와이어 색상은 이제 특정 기능을 나타내므로 설치 및 유지 보수 중에 전기 부품을보다 쉽게 식별하고 처리 할 수 있습니다.이는 운영 프로세스를 가속화 할뿐만 아니라 실수의 기회를 줄이고 사용자와 기술자 모두가 안전하게 지내도록 도와줍니다.이 기사는 와이어 컬러 코드의 중요성, 안...1월1일에서 66913
-

퍼지 밸브 가이드 : 최적의 엔진 성능을위한 기능, 증상, 테스트 및 교체
퍼지 밸브는 대기로 빠져 나가기 전에 연료 증기를 관리함으로써 공기를 깨끗하게 유지하는 데 도움이되는 자동차 시스템의 핵심 부분입니다.이것은 오염을 줄임으로써 환경에 도움이 될뿐만 아니라 자동차를 개선하고 연료를보다 효율적으로 사용하게합니다.이 기사에서는 퍼지 밸브가 작동하는 방식, 유형 및 제대로 작동하는지 확인하는 방법을 포함하여 Purge 밸브에...1월1일에서 63055
-
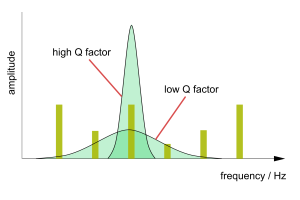
품질 (Q) 요인 : 방정식 및 응용
RF (Radio Frequencies)를 사용하는 전자 시스템에서 인덕터와 공진기가 얼마나 잘 작동하는지 확인할 때 품질 요소 또는 'Q'가 중요합니다.'Q'는 회로가 에너지 손실을 최소화하고 시스템이 주요 주파수 주변에서 처리 할 수있는 주파수 범위에 얼마나 잘 영향을 미치는지 측정합니다.인덕터, 커패시터 및 조정 된 회로가있는 시스템에서 더 높은...1월1일에서 63012
-
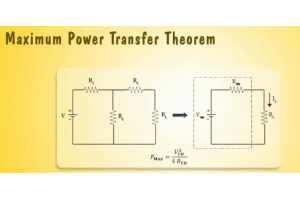
최대 전력 전송 정리로 피크 성능을 달성합니다
최대 전력 전송 정리는 배터리 또는 발전기와 같은 소스의 에너지가 연결 하중으로 흐르는 방법을 설명합니다.부하가 가장 많은 전력을받는 정확한 조건을 보여줍니다.이 기사는 정리의 의미, DC 및 AC 회로에서 작동하는 방식, 배후의 증거, 실제 응용 프로그램 및 장점 및 단점을 다룹니다.결국,이 원리가 태양 전지판, 라디오, 스피커 및 무선 충전과 같은...1월1일에서 54081
-
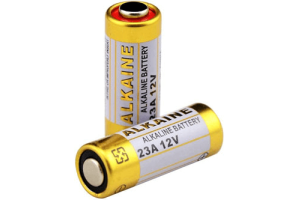
A23 배터리 사양 및 호환성
A23 배터리는 전압이 높은 작은 실린더 모양의 배터리입니다.23A, 23AE 또는 MN21이라고도하는 경우에도 12 볼트로 작동하며 AA 또는 AAA 배터리보다 훨씬 높습니다.특별한 디자인은 작지만 강력한 전원이 필요한 가제트에 적합합니다.이 기사는 A23 배터리의 기능, 성능 및 사용을 살펴 봅니다.다른 브랜드와 기타 일반적인 배터...1월1일에서 52131
핫 부품 번호
-

MAX202EWE+T
Analog Devices Inc./Maxim Integrated
IC TRANSCEIVER FULL 2/2 16SOIC
BAS40-06-7-F
Diodes Incorporated
DIODE ARRAY SCHOTTKY 40V SOT23-3
AOZ1948AI-01
Alpha & Omega Semiconductor Inc.
IC LED DRIVER CTRLR PWM 8SOIC
HMC547ALC3
Analog Devices Inc.
IC RF SWITCH SPDT 28GHZ 16SMT
MAX1823EUB+T
Analog Devices Inc./Maxim Integrated
IC SW DUAL USB AUTORESET 10-UMAX
CPH3249-TL-E
onsemi
TRANS NPN 350V 1A 3CPH
DG403DYZ
Intersil
IC SWITCH SPDT X 2 45OHM 16SOIC
170M3987
Eaton - Bussmann Electrical Division
FUSE SQUARE 200A 1KV RECTANGULAR
CL05B392KB5NNNC
Samsung Electro-Mechanics
CAP CER 3900PF 50V X7R 0402
TS53YJ503MR10
Vishay Sfernice
TRIMMER 50K OHM 0.25W J LEAD TOP
UDZSTE-173.9B
Rohm Semiconductor
DIODE ZENER 3.9V 200MW UMD2
MPC8541EVTAQF
NXP USA Inc.
IC MPU MPC85XX 1.0GHZ 783FCBGA
CC0402BRNPO9BNR75
YAGEO
CAP CER 0.75PF 50V C0G/NPO 0402
ISL28023FR60Z-T
Renesas Electronics America Inc
IC VOLT MONITOR PRECISION 24QFN
LTF5022T-6R8N1R7-D
TDK Corporation
FIXED IND 6.8UH 1.8A 110MOHM SMD
CY7C0851AV-133AXI
Infineon Technologies
IC SRAM 2MBIT PARALLEL 176TQFP
MAX4602CAE+T
Analog Devices Inc./Maxim Integrated
IC SW SPST-NOX4 2.5OHM 16SSOP
ISL83386EIV
Renesas Electronics America Inc
IC TRANSCEIVER FULL 3/2 20TSSOP -

TL750L10CDR
Texas Instruments
IC REG LINEAR 10V 150MA 8SOIC
SPM4015T-R68M-LR
TDK Corporation
FIXED IND 680NH SMD
BR24T64FVT-WE2
Rohm Semiconductor
IC EEPROM 64KBIT I2C 8TSSOP
VI-AIM-C1-06
Vicor Corporation
VI-AIM-C-06
VLS3012ET-330M
TDK Corporation
FIXED IND 33UH 370MA 1.248OHM SM
TPS622319DRYR
Texas Instruments
IC REG BUCK 1.2V 500MA 6SON
1810BP07B200T
Johanson Technology
FILTER BANDPASS GSM/CDMA1810 MHZ
CC1206KRX7R0BB473
YAGEO
CAP CER 0.047UF 100V X7R 1206
PQ200WNA1ZPH
Sharp Microelectronics
IC REG LINEAR POS ADJ 1A SC63
CC1812JKNPOCBN101
YAGEO
CAP CER 100PF 1KV C0G/NPO 1812
IXTH150N17T
IXYS
MOSFET N-CH 175V 150A TO247
BLM21PG600SN1D
Murata Electronics
FERRITE BEAD 60 OHM 0805 1LN
MAX1912EUB+
Analog Devices Inc./Maxim Integrated
IC LED DRIVER RGLTR 120MA 10UMAX
TLV73330PDQNR
Texas Instruments
IC REG LINEAR 3V 300MA 4X2SON
MC74LVX574DTR2G
onsemi
IC FF D-TYPE SNGL 8BIT 20TSSOP
LTC4365HTS8#TRPBF
Analog Devices Inc.
IC OVERVOLTAGE PROT TSOT23-8
PI7C8150BMAE
Diodes Incorporated
IC INTFACE SPECIALIZED 208FQFP
1N2981RB
Microchip Technology
DIODE ZENER 17V 10W DO213AA -

TLE4264G
Infineon Technologies
IC REG LINEAR 5V 120MA SOT223-4
SS13M RSG
Taiwan Semiconductor Corporation
DIODE SCHOTTKY 30V 1A MICRO SMA
PIC18F14K22T-I/SS
Microchip Technology
IC MCU 8BIT 16KB FLASH 20SSOP
MAX5202BEUB+T
Analog Devices Inc./Maxim Integrated
IC DAC 16BIT V-OUT 10UMAX
MCZ33903CP5EKR2
NXP USA Inc.
IC INTERFACE SPECIALIZED 32SOIC
BBS3002-DL-1E
onsemi
MOSFET P-CH 60V 100A D2PAK
RCH664NP-101K
Sumida America Components Inc.
FIXED IND 100UH 590MA 430MOHM TH
0603YA471K4T2A
KYOCERA AVX
CAP CER 470PF 16V NP0 0603
STD6NM60N
STMicroelectronics
MOSFET N-CH 600V 4.6A DPAK
FLZ6V2B
onsemi
DIODE ZENER 6.1V 500MW SOD80
RN1710,LF
Toshiba Semiconductor and Storage
NPNX2 BRT Q1BSR4.7KOHM Q1BERINF.
TMP03FSZ-REEL
Analog Devices Inc.
SENSOR DIGITAL -40C-100C 8SOIC
KBU1006
GeneSiC Semiconductor
BRIDGE RECT 1PHASE 600V 10A KBU
IPP032N06N3GXKSA1
Infineon Technologies
MOSFET N-CH 60V 120A TO220-3
843031AGI-01LFT
Renesas Electronics America Inc
IC CLOCK GENERATOR 8TSSOP
MMSZ5230B
Diotec Semiconductor
ZENER SOD-123 4.7V 0.5W 5%
MRF6V14300HR5
NXP USA Inc.
RF MOSFET LDMOS 50V NI780H
TS3A5018DBQR
Texas Instruments
IC SWITCH SPDT X 4 10OHM 16SSOP